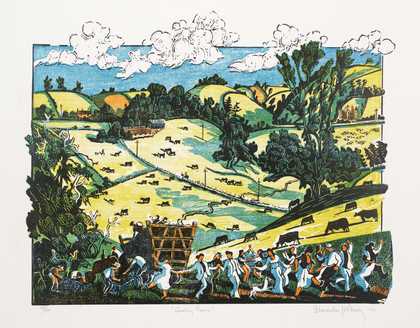
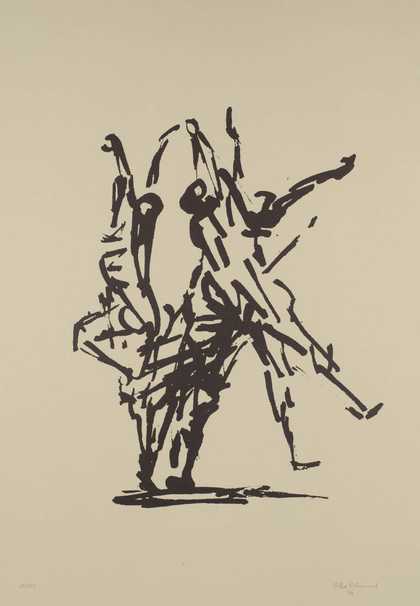
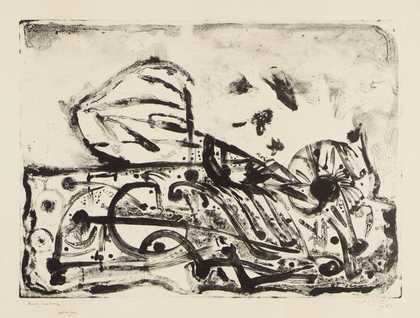
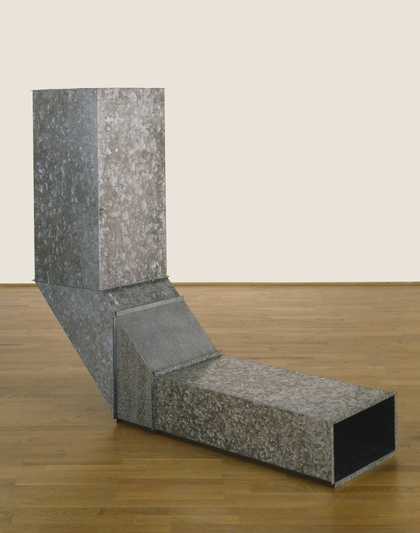
You might like Left Right Country Dance Alexander Hollweg 1976 Dance Oliffe Richmond 1966 Dance Landscape Cecil Collins 1962 The City of the Circle and the Square Sir Eduardo Paolozzi 1963 and 1966 144 Magnesium Square Carl Andre 1969 Square Forms Dame Barbara Hepworth 1962 A Square of Ground Richard Long CBE 1966 Square Tubes [Series D] Charlotte Posenenske 1967 Square Tubes [Series D] Charlotte Posenenske 1967 Square Tubes [Series D] Charlotte Posenenske 1967 Square Tubes [Series D] Charlotte Posenenske 1967 Square Tubes [Series D] Charlotte Posenenske 1967